KUKA机器人由主体、驱动及控制系统和编程操作系统(示教器)三个基本部分组成。机器人的基本操作通过示教器实现,本节重点讲解示教器的基本功能及机器人手动单轴操作的方法。操作篇:1、了解机器人示教器的功能按键;2、掌握机器人单轴动作的操作方法。
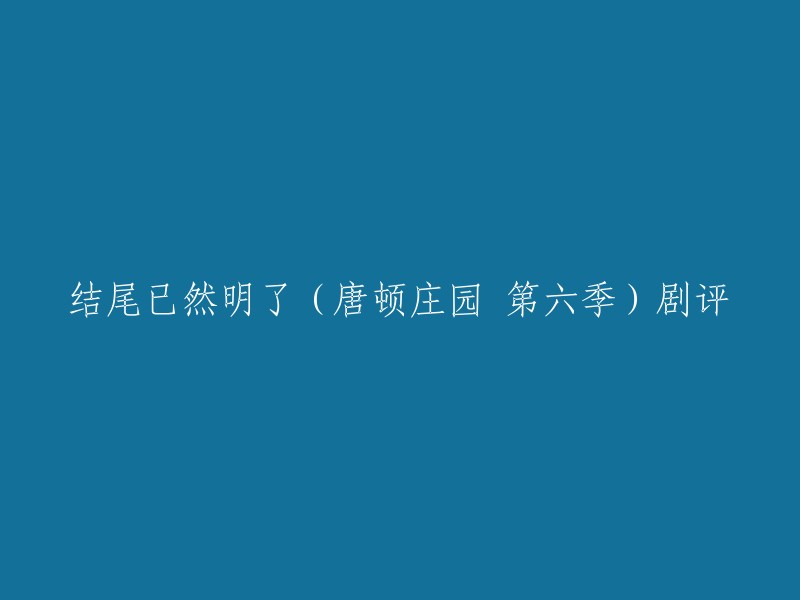
机器人示教器功能简介:示教器功能按键说明:1. 用于带电拔下示教器的按钮;2. 运行模式选择钥匙开关;3. 紧急停止键;4. 3D 鼠标;5. 移动键;6. 用于设定程序倍率(程序速度)的按键;7. 用于设定手动倍率(手动示教速度)的按键;8. 主菜单按键;9. 工艺键;10. 启动键,通过启动键可启动一个程序;11. 逆向启动键,用逆向启动键可逆向启动一个程序。12. 停止键。用停止键可暂停正运行中的程序;13. 键盘显示键盘。
库卡机器人有哪些运行方式?1、T1(手动慢速运行)用于测试运行、编程和示教;2、T2(手动快速运行)用于测试运行;3、AUT(自动运行)用于无上级控制系统的机器人;4、EXT(外部自动运行)用于带上级控制系统 (PLC)工业机器人。如何通过示教器设置运行方式?1、在示教器上转动用于连接管理器的钥匙开关,连接管理器随即显示。2、选择运行方式,要手动移动机器人,这里我们选择T1(手动慢速运行)模式。3、将用于连接管理器的开关再次转回初始位置。所选的运行方式会显示在示教器的状态栏中。
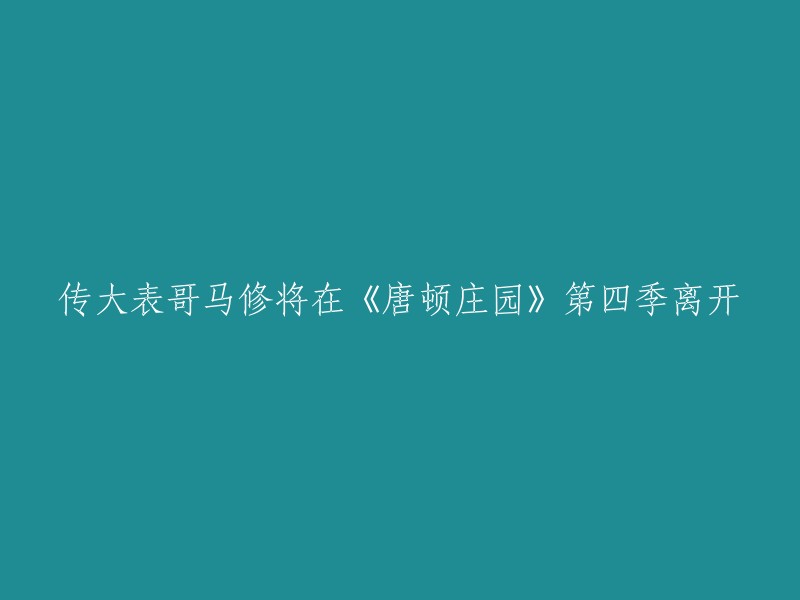
查看并确认机器人信息提示:选择了机器人运行方式后,在示教器触摸屏画面中,我们首先要找到机器人信息提示栏,查看机器人的状态(有无异常报警信息,是否允许操作)。1信息提示栏;2信息提示计数器。用“OK” 来对各条信息提示逐条进行确认或者用“全部 OK” 来对所有信息提示进行确认,确定机器人无异常报错后,机器人才能手动操作。单独运动机器人各轴:一、理解机器人的本体构造;车间使用的 KUKA 机器人,本体由6个轴,每个轴由1个伺服电机驱动,单独动作机器人各轴即是上电后控制伺服电机正反转,单轴操作在T1模式下进行。二、选择轴坐标选项;三、设置手动速度
一、在操作机器人前,请务必根据实际情况提前设置手动操作速度。请注意,当手动速度被设置为0%时,机器人将无法进行任何动作。
二、将确认开关切换至中间挡位并保持按下。KUKA机器人的确认开关共有三个,分别位于示教器触摸屏的背面。每个确认开关都有三个档位可供选择。在手动操作时,请确保确认开关保持在中间档位,以便机器人能够上电并执行动作。
三、确认开关的档位功能如下:
1. 未按下(初始位置):机器人无法执行任何动作。
2. 中位:机器人可以执行动作。
3. 完全按下(警报位置):机器人无法执行任何动作。
四、在使用手动操作模式时,请按下正向或负向移动键,使机器人所对应的轴(A1-A6)沿正方向或反方向运动。
五、在完成所需的手动操作后,请松开确认开关。这样,机器人就会停止动作。